![]()
Physique de la Chaîne de Mesure 3
Systèmes asservis
Objectifs pédagogiques :
Introduire les outils et les concepts fondamentaux de l’approche « fréquentielle » de l’automatique linéaire à temps continu et la problématique de la commande à temps discret.
Programme :
- Notion de système dynamique, concepts et outils mathématiques pour l’étude des systèmes d’équations différentielles linéaires à coefficients constants : transformée de Laplace, fonction de transfert, réponse impulsionnelle et réponse indicielle, régime transitoire et régime définitif, retards purs.
- Définition et caractérisation de la stabilité d’un système linéaire à partir de sa fonction de transfert, critère de Routh-Hurwitz, réponse fréquentielle d’un système stable.
- Étude des systèmes du premier ordre et des systèmes stables du second ordre dans les domaines temporel et fréquentiel.
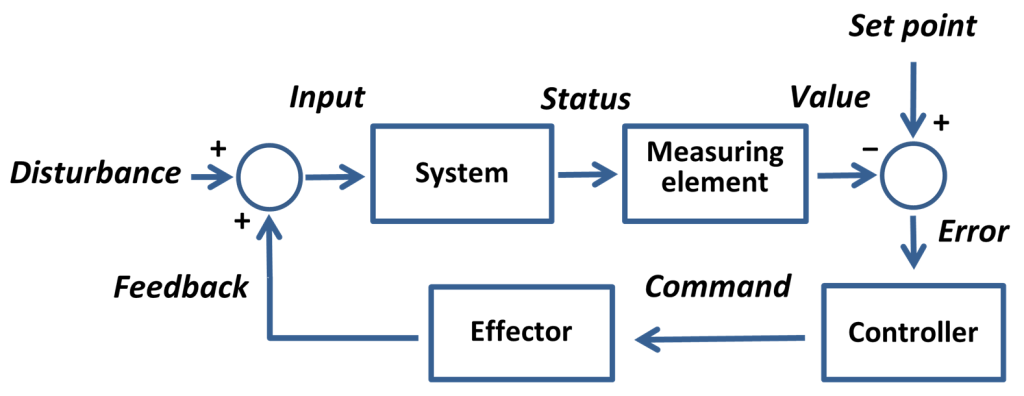
- Notion de système asservi. Passage de la boucle ouverte à la boucle fermée. Caractérisation des performances d’un système asservi.
- Régulateurs PID : définition, propriétés et réglage.
- Étude de la stabilité d’un système asservi en appliquant le critère de Nyquist, définition et évaluation des marges de stabilité.
- Méthodes de synthèse d’un régulateur linéaire.
- Commande à temps discret : échantillonneur et bloqueur, approximation d’un système asservi à temps continu par discrétisation du régulateur, formalisme pour l’étude des systèmes dynamiques à temps discret.
Pré-requis :
- Notions de base et procédures de calcul sur les nombres complexes et les fonctions d’une variable complexe
- Transformations d’une fonction du temps dans le domaine fréquentiel (transformées de Fourier et de Laplace)
- Notions de base du calcul polynomial
Compétences visées :
Les étudiants ayant suivi cet enseignement devront pouvoir, à partir d’un modèle du système à commander donné sous la forme d’une ou plusieurs équations différentielles :
- Étudier le comportement du système à commander (stabilité, réponses temporelle et fréquentielle)
- Choisir un type de régulateur approprié en fonction des différents objectifs de commande (précision, rapidité, dépassements, poursuite d’une trajectoire de référence, réjection de perturbations…)
- Évaluer les performances du système commandé et leur robustesse
Enseignant : Henri François Raynaud
| CM | 12 H |
| TP | 12 H |
| Projet | 12 H |
| ECTS | 3 |
| Lieu | Villetaneuse |
| Langue | French |